Services > Prestations
Canalisations et galeries longues distances
Inspection interne vidéo/sonar à partir DN 300mm
Modélisation 3D et contrôle d’ovalisation
Jusqu’à 5000m de distance


Inspection de la galerie des Mées
EDF - Les Mées (04), France - 2020
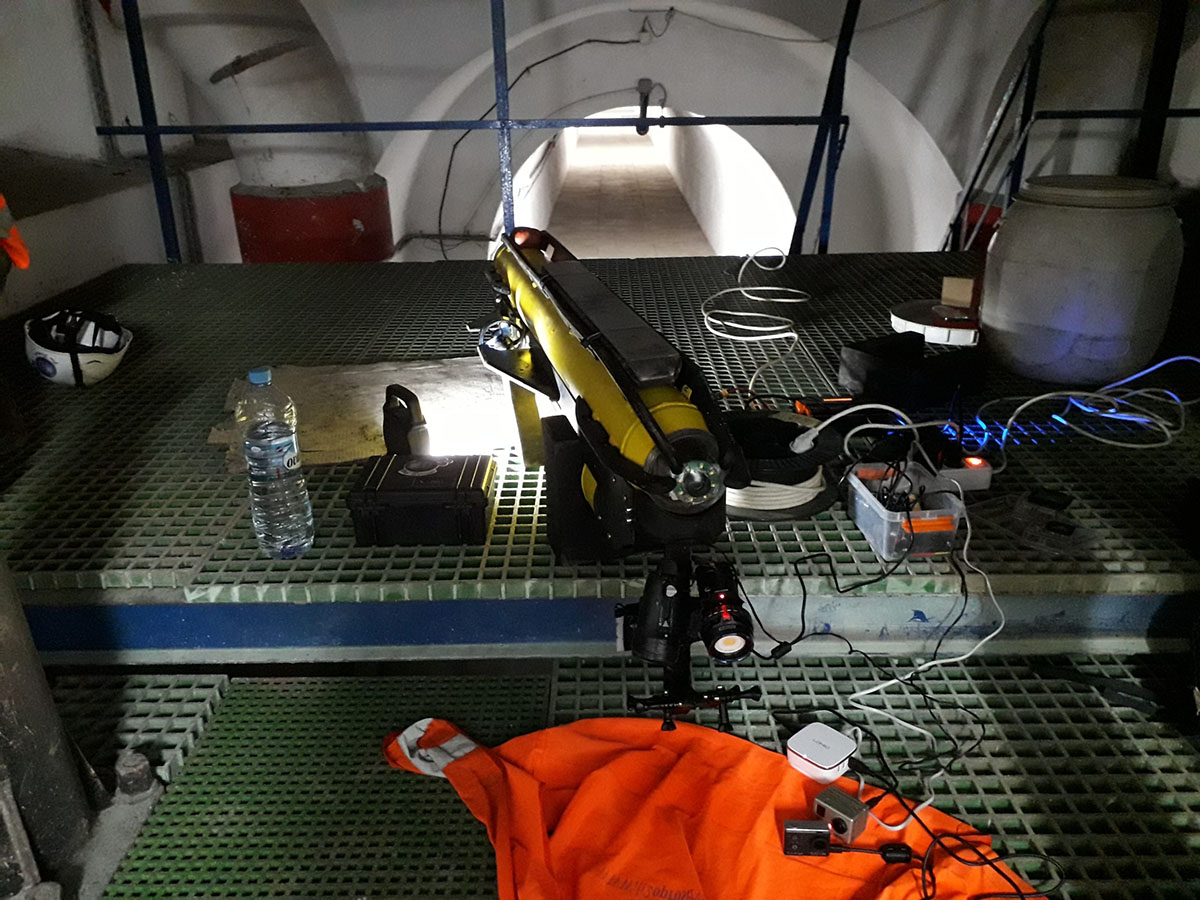
La mission visait à collecter les données nécessaires à l’évaluation de l’état général du génie civil des tunnels, des vannes de vidanges, des génératrices ainsi que le niveau d’envasement du canal. Une des difficultés techniques consistait à réaliser cette inspection sur un linéaire de 2,7 km avec un nombre de points d’accès restreint, nécessitant ainsi la mise en œuvre d’une solution capable de parcourir de longues distances, parfois face au courant. Par ailleurs, les conditions de visibilité étant très réduites, il était probable qu’une inspection uniquement par vidéo soit très fastidieuse et longue.
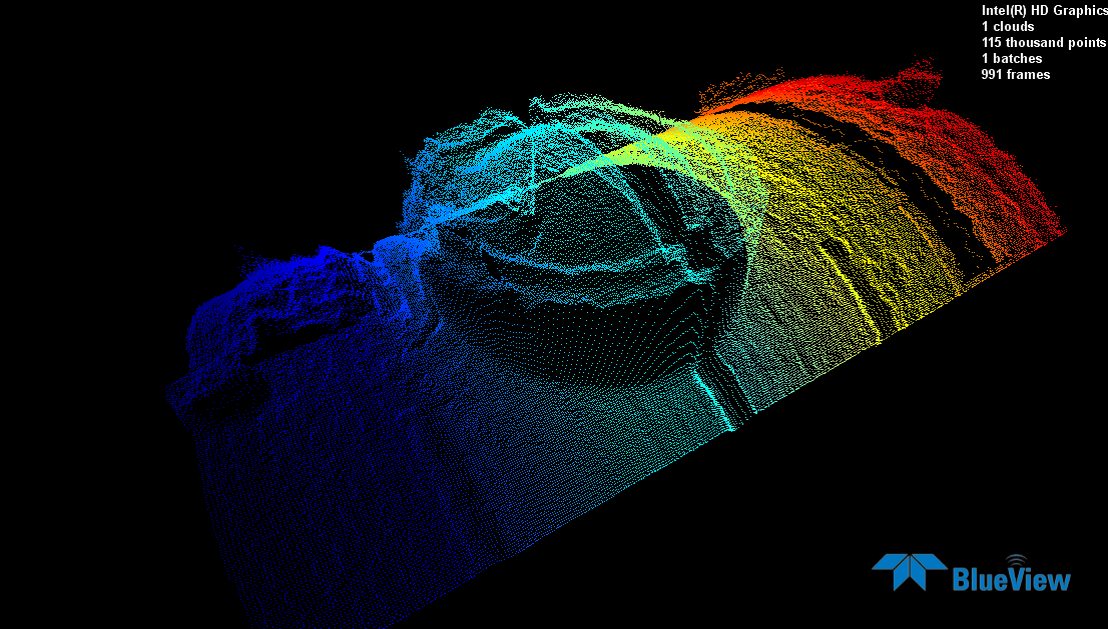
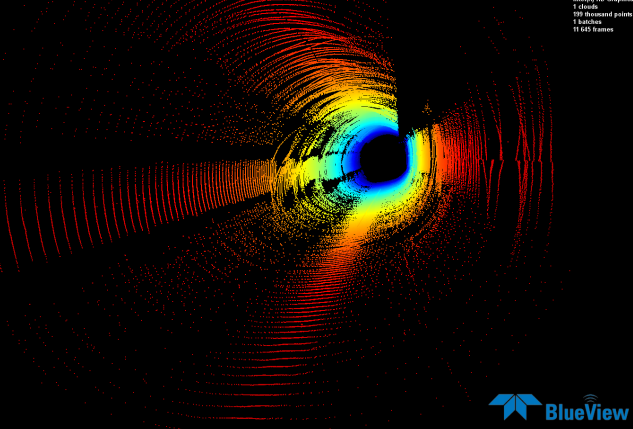
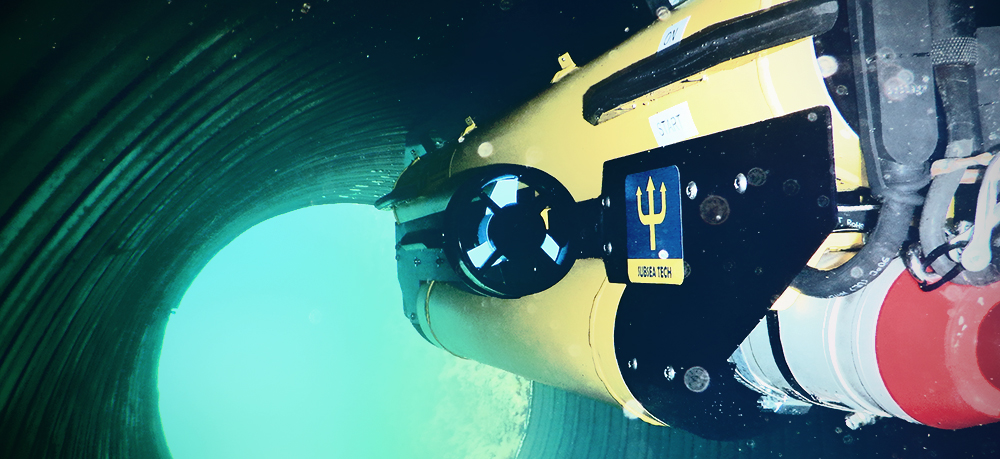
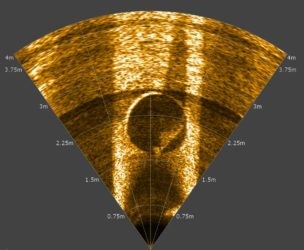
La solution proposée par Subsea Tech pour répondre à ces contraintes opérationnelles, reposait sur l’utilisation d’un ROV Tortuga, équipé pour l’occasion d’un ombilical fibre optique de 3300m de longueur et muni d’une caméra acoustique Oculus M750d bi-fréquence (700 kHz – 1200 kHz) ainsi que d’un sonar profileur Imagenex 831A. Grâce à une ouverture horizontale de 130° et une portée allant jusqu’à 120m, le premier offre une image dynamique de l’environnement situé devant le ROV et permet de détecter les désordres structurels là où la vidéo est inefficace. Le niveau de résolution du sonar en fréquence 1200 kHz permet de repérer et dimensionner des défauts de l’ordre de 20mm à plusieurs mètres de distance. Le sonar profileur permet de détecter les irrégularités sur la totalité de la section du tunnel en effectuant des scans circulaires.



Inspection du Tunnel de l’Assassin sur le canal de Marseille
SEMM - Marseille (13), France - 2021
Subsea Tech a mis au point pour la Société des Eaux de Marseille Métropole un système d’inspection flottant spécialement conçu pour l’inspection de galeries partiellement en charge sur des distances importantes. Ce nouveau système, baptisé NAVIGOH, permet l’inspection simultanée de la partie hors eau (voute et pieds droits), grâce à deux caméras 4K ouvrant à 180° et à un puissant éclairage LEDs, et de la partie immergée (radier et pieds droits), grâce à un sonar profileur et à un sonar d’imagerie. Le système est entièrement autonome en énergie et n’est relié à l’opérateur que par un câble Dyneema de très faible diamètre mais offrant une résistance à la traction > 400 kg. NAVIGOH est déployé en amont du tunnel et utilise simplement le courant du canal comme moteur. La vitesse de dévalaison est contrôlée par un treuil électrique, qui permet également de contrôler l’odométrie au sein du tunnel.
La mission, conduite en janvier 2021, a permis de parcourir avec succès l’intégralité du linéaire du tunnel, soit 3400m. Les données enregistrées ont permis de répondre aux besoins exprimés par la SEMM en matière d’identification et de localisation des désordres.




Inspection visuelle et contrôle d’ovalisation de conduites d’eau potable à Alger
H2O ProServices - Alger, Algérie- 2019
Subsea Tech a réalisé l’inspection interne de 2 canalisations d’eau potable de diamètre 2000mm sur respectivement 1600m et 1100m de distance. Pour les besoins de cette mission, Subsea Tech a déployé son robot sous-marin autonome Torpedo, conçu en 2018 à l’occasion d’une autre mission. Le Torpedo est capable de parcourir jusqu’à 5000 m dans des canalisations de diamètre >500mm pour effectuer des inspections visuelles/sonar et mettre en évidence des problèmes structurels et fonctionnels.
Le système est composé d’un véhicule en forme de torpille équipé de batteries qui lui confère une autonomie de plusieurs heures, ainsi que d’un treuil motorisé avec une bobine de 5000m de câble ultrarésistant. Le treuil permet non seulement de contrôler la vitesse d’évolution du robot et de le récupérer en fin de mission mais également de mesurer la distance parcourue grâce à un odomètre et ainsi de localiser précisément les anomalies observées dans la canalisation.
L’engin est légèrement flottant dans l’eau douce et est équipé de patins pour le stabiliser au plafond de la canalisation lors de son évolution. Le très faible diamètre du câble (2,1mm) et le design hydrodynamique de l’engin permettent d’évoluer dans des conditions optimales.
Torpedo est équipé d’une caméra avant HD de très haute sensibilité avec éclairage LED et peut également embarquer un sonar d’imagerie (Blueview M900-130 ou Oculus 750D par exemple) pour les inspections en conditions de visibilité extrêmement réduite ainsi qu’un sonar profileur (Imagenex 831A par exemple) pour effectuer des contrôles d’ovalisation des conduites. L’ensemble des données caméras et capteurs est enregistré localement. Compte tenu du diamètre important de la canalisation et afin d’améliorer la qualité des prises de vue vidéo, un système de caméra externe et des éclairages associés (caméra « GoPro », fournie par H2O Pro Services) a été ajouté sous l’avant du véhicule.
Torpedo est également intervenu avec succès dans le cadre de plusieurs inspections en France et à l’étranger, sur des linéaires allant jusqu’à 4500m :
- Agglomération de Thau : émissaire en mer de diamètre 1100mm sur une distance de 2 x 2500m (en entrant de chaque côté de l’émissaire)
- Egypte : Emissaire en mer de diamètre 800 mm sur 2100m de distance
- Angola : canalisation pétrolière de diamètre 1000 mm sur 4 500 m

Inspection de deux conduites d’eau de mer – Centrale EDF PEI de Bellefontaine
EDF - Bellefontaine, Martinique (France) - 2018
Subsea Tech a été mandaté par EDF pour réaliser l’inspection de 2 conduites Ø1400 mm servant à l’alimentation d’une usine de dessalement d’eau de mer à Bellefontaine, en Martinique. La longueur totale à inspecter était de 480 m linéaires pour chacune des conduites.
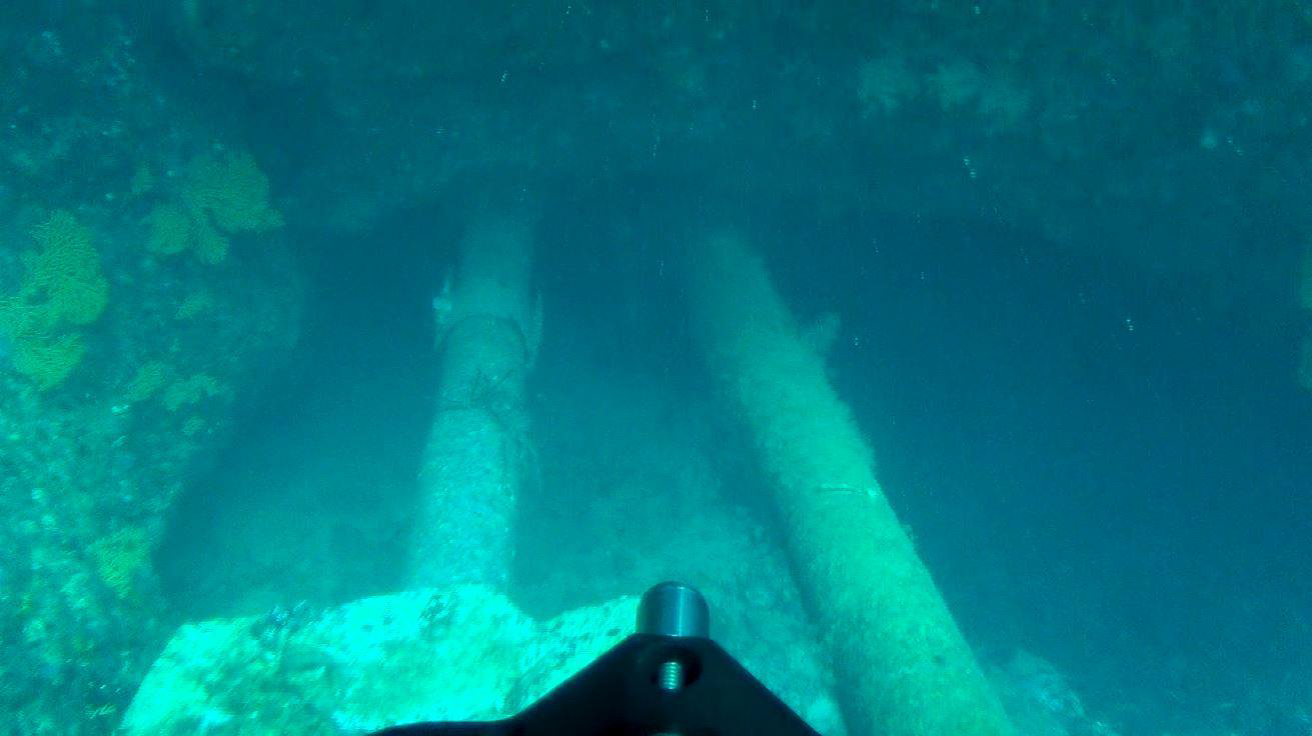
Entre autres contraintes opérationnelles, la présence d’un mélange d’eau douce et d’eau salée dans la conduite avec une séparation nette entre les deux phases et une visibilité nulle dans la partie inférieure (eau de mer). Cette contrainte a imposé de naviguer dans la partie supérieure de la conduite où des concrétions tranchantes menaçaient l’ombilical et le carénage du ROV. L’inspection de la partie inférieure et latérales de la conduite était assurée grâce au sonar d’imagerie Oculus M750d. En outre, un sonar profileur Imagenex 831A fixé sur le Tortuga a permis d’effectuer un contrôle d’ovalisation sur la totalité du linéaire des canalisations. Autre difficulté : la présence de 4 coudes au total dans chaque canalisations, dont 2 à 45°, créant des frottements importants au niveau de l’ombilical du ROV.
Ces contraintes ont malgré tout été surmontées et le Tortuga a démontré qu’il était capable d’évoluer en milieu confiné sur des linéaires importants en emportant plusieurs capteurs, et ce malgré la présence de nombreuses singularités.



Quelques références
- MERCERON TP – Capbreton (40): Inspection visuelle et profil 3D d’une canalisation PEHD Ø400, longueur 50 m pour évaluer son usure par transport de sable
- SUEZ – Menton (06) : Inspection subaquatique par ROV d’un émissaire en mer depuis une chambre de curage et depuis le rejet à 48m de profondeur
- VEOLIA – Caluire (69) : Inspection subaquatique par ROV d’une canalisation d’eau potable sur 300m pour l’Eau du Grand Lyon
- BRL – Lunel (34) : Vérification de la géométrie et évaluation de la quantité de sédiments déposés dans 5 siphons
- CREOCEAN – Ajaccio (2A) : Inspection visuelle d’un émissaire en mer sur 800 ml dans le golfe d’Ajaccio
- ORLLATI – Genève (Suisse) : Inspection d’un déversoir d’orage, sur une distance de 120 mètres, se jetant dans le lac Léman
- SAFEGE – Marseille (13) : Réalisation de l’inspection des DO de Barbusse-République – Canebière – Prado
- EDF – Casterino (06) : Inspection subaquatique de la galerie d’amenée de Casterino (section fer à cheval d’environ 1.5m x 1.9m et longueur environ 1200m)
Et plus de 35 autres références auprès de donneurs d’ordres publics et privés