Services > Domaines d’intervention
Inspection de barrages et ouvrages hydrauliques par ROV
Inspection visuelle et acoustique
Identification de défauts
Modélisation 3D

Inspection de barrages par ROV – notre expertise
Inspection subaquatique du barrage de Damery
GINGER – Damery (51) – 2025
Subsea Tech a réalisé une inspection des parties subaquatiques du barrage de Damery afin d’évaluer l’état du pied d’ouvrage et des vannettes. L’opération a été conduite à l’aide d’un ROV Mini TORTUGA équipé d’une caméra Oculus M3000d, couplé à une régie-vidéo IP pour le suivi en temps réel. Cette mission a permis d’obtenir des images précises du radier et d’apporter des éléments essentiels à l’évaluation de l’intégrité de l’ouvrage.




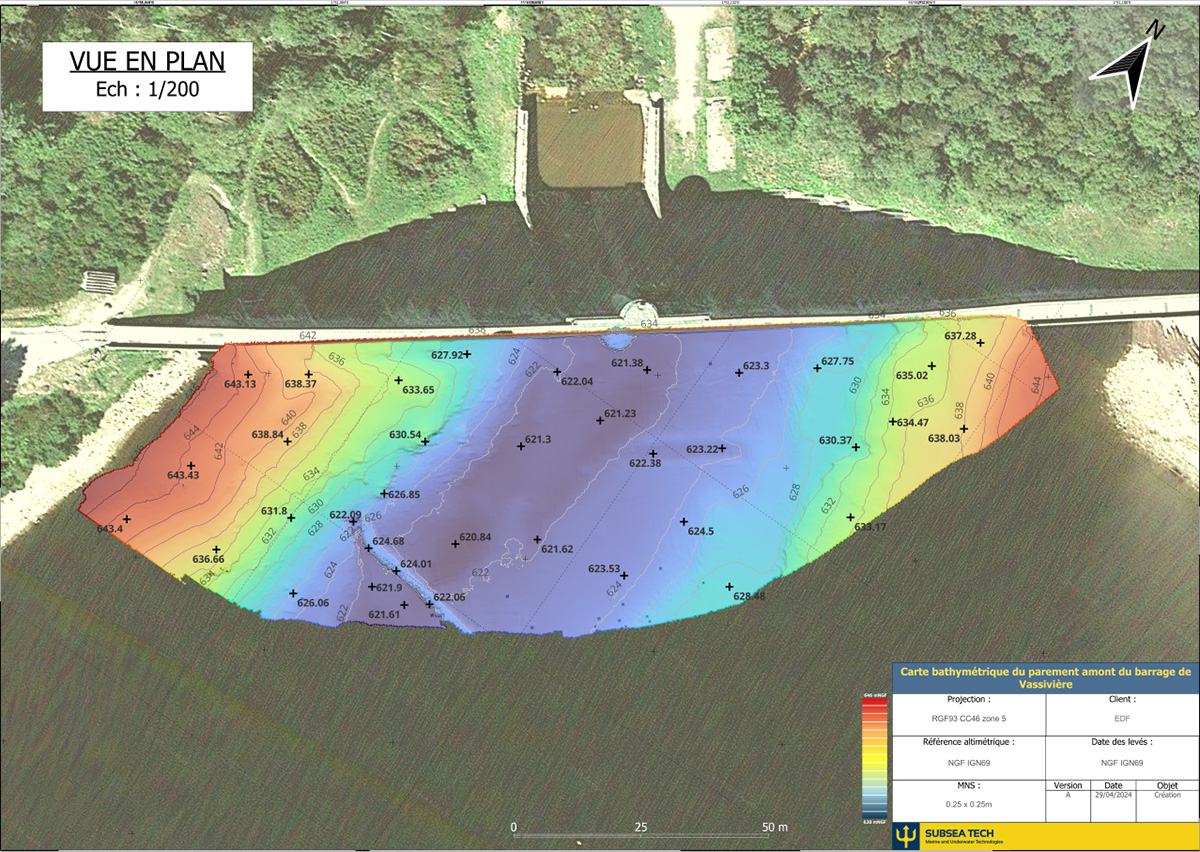
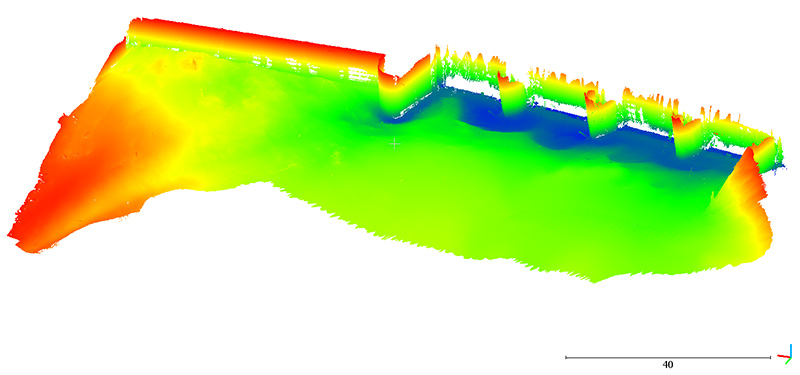
Visite au barrage de Vassivière
EDF – Royère-de-Vassivière (87) – 2024
Dans le cadre d’une évaluation préalable à un accord-cadre, Subsea Tech a réalisé l’inspection subaquatique d’une partie du barrage de Vassivière. Plusieurs moyens techniques ont été mobilisés afin de répondre à l’ensemble des besoins de la mission : le ROV Mini TORTUGA équipé d’un sonar Oculus, d’un système de positionnement USBL SeaTrac et du système de photogrammétrie Hydro 300, le ROV Guardian, ainsi que le CataROB doté d’un sonar multifaisceaux NORBIT. Cette combinaison d’outils a permis de mener une inspection complète et de fournir à EDF les données nécessaires à l’évaluation de l’état de l’ouvrage.

Inspection subaquatique, bathymétrie et scan 3D au barrage de Saint-Lazare
EDF – Sisteron (04) – 2023
Subsea Tech a effectué une inspection du barrage de Saint Lazare, situé à Sisteron dans les Alpes de Haute Provence. Cette opération impliquait la réalisation d’une bathymétrie de la partie aval du barrage, d’une photogrammétrie du point d’ancrage de la drome, ainsi que d’une inspection visuelle d’un des évacuateurs de crue. Pour mener à bien cette mission, Subsea Tech a déployé un USV de type Catarob ainsi qu’un ROV Mini TORTUGA HYDRO. Compacts et légers, ces engins ont été directement mis à l’eau depuis le quai à l’aide d’une potence.


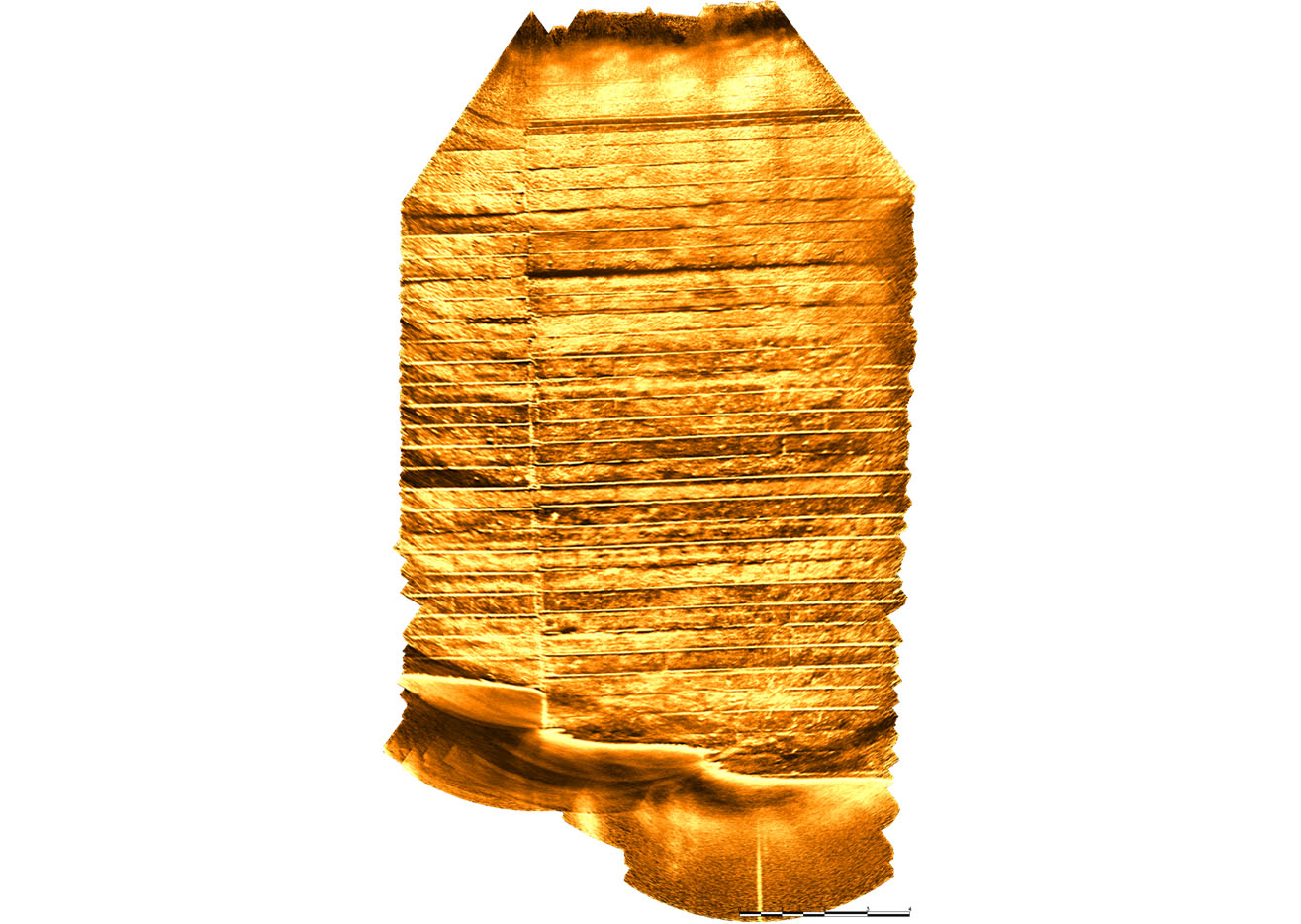
Inspections subaquatiques par ROV du barrage de Lavalette
FUGRO - Laptes (43) - 2021
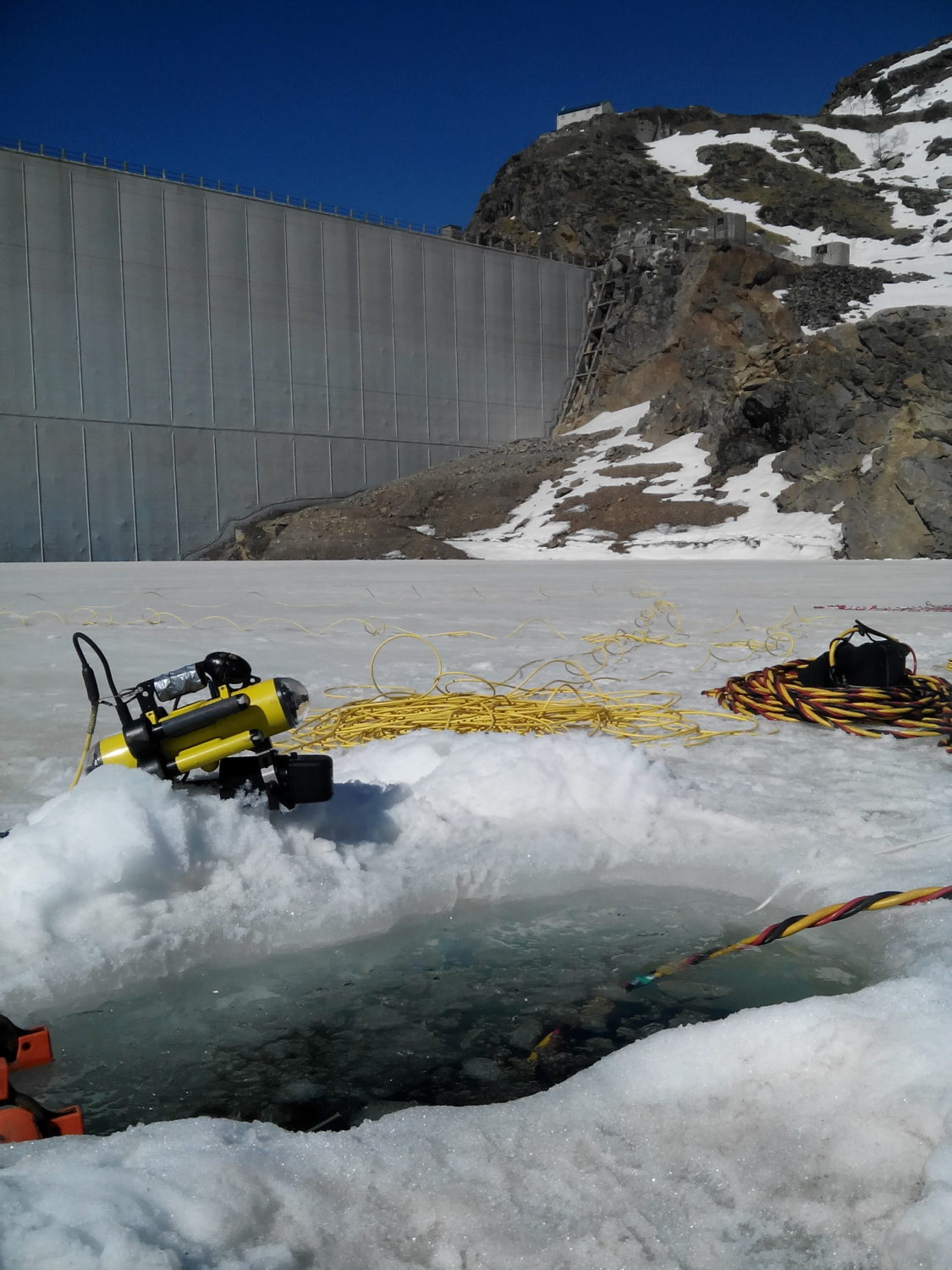
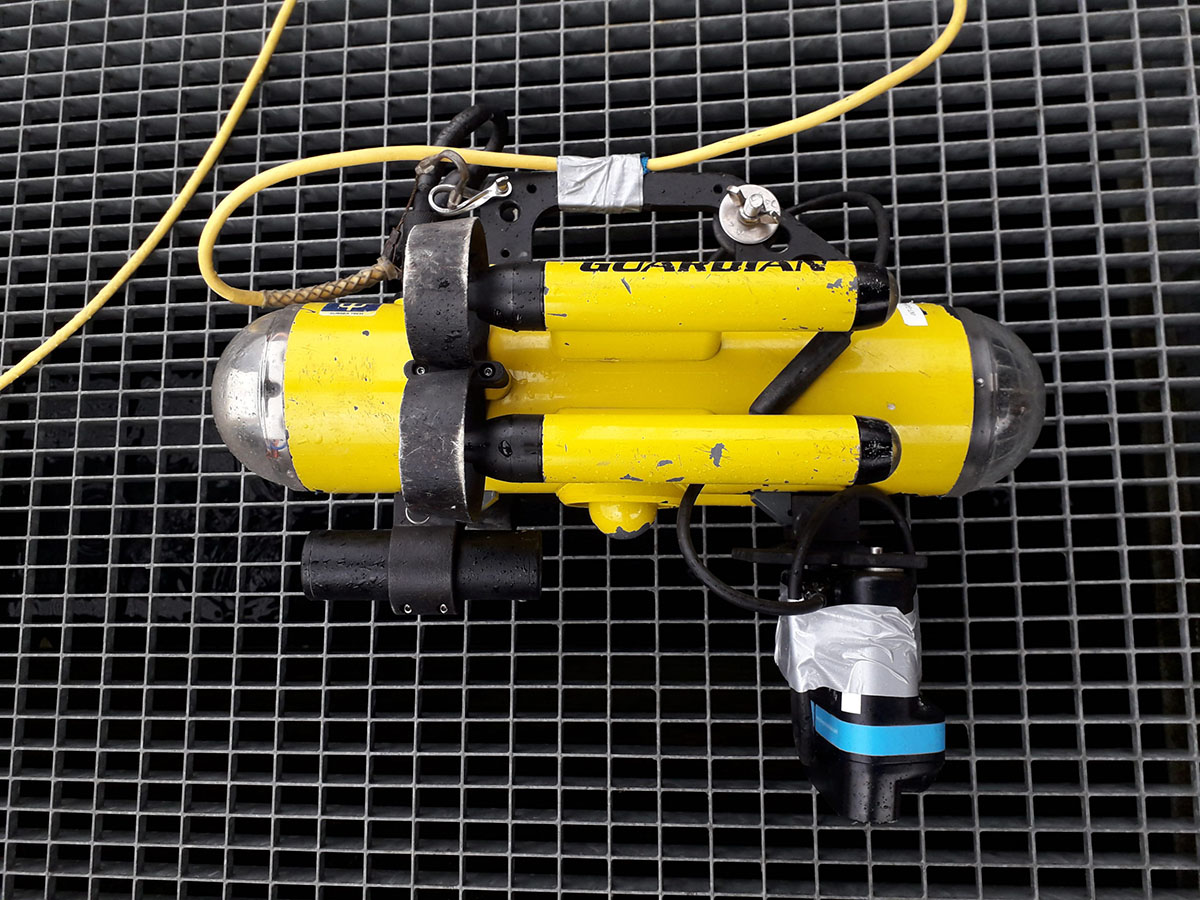
La société FUGRO a sous-traité à Subsea Tech la réalisation des inspections subaquatiques par ROV du barrage de Lavalette en Haute-Loire, dans le cadre d’un marché attribué par Saint-Etienne Métropole. Les objectifs de la mission étaient l’inspection du parement amont, des conduites de restitution (DN 1100, 1000, 800 et 500), du bassin de dissipation, de conduites de dérivation et du puits d’alarme de haut niveau. La plupart des inspections ont été réalisées avec notre ROV Tortuga, équipé de plusieurs capteurs dont un sonar multifaisceaux 2D Oculus M750d (caméra acoustique – aide à la navigation du ROV, identification de structures), un sonar profileur Imagenex 831-A (identification de défauts d’ovalisation des conduites) et une sonde ultrasonique Cygnus (mesures d’épaisseurs des parois de conduites). Le puits d’alarme a quant à lui été inspecté à l’aide d’un mini-ROV Guardian, plus compact, notamment en raison de contraintes dimensionnelles.



Inspection de 3 barrages sur l’Oum Errabiâ
TRACTEBEL - Maroc - 2020
Plusieurs années après sa dernière mission dans le pays, Subsea Tech a été mandaté par Tractebel, filiale du Groupe ENGIE, pour réaliser les inspections visuelles et acoustiques, en air et en eau, de 3 barrages situés sur l’Oum Errabiâ, au sud-ouest de Casablanca : Imfout, Daourat et Sidi Said Maachou.
Les inspections subaquatiques ont été menées avec le mini-ROV Guardian équipé d’un sonar multifaisceaux Blueprint Oculus M750d, très utile en raison des mauvaises conditions de visibilité dues à la turbidité de l’eau sur les 3 sites. Les inspections des parties émergées ont quant à elles été réalisées depuis un petit semi-rigide équipé d’un moteur électrique.
Les inspections ont porté aussi bien sur les parties amont qu’aval des barrages et se sont focalisées sur les grilles de prise d’eau, les parements, les radiers, les batardeaux et les vannes d’évacuateurs de crues. En parallèle, l’utilisation du mini-ROV a permis de déterminer le niveau d’envasement en tête et en pied de barrage, par comparaison entre les côtes théoriques des radiers et la profondeur réelle constatée (par le capteur de pression sur le ROV). Pour la partie en air, les inspections ont porté sur l’état du génie civil et sur l’évaluation de la côte de l’eau dans les évacuateurs de crues (grâce à une sonde piézométrique).




Inspections visuelles et acoustiques par ROV sur le barrage de Génissiat
O'CAN - Génissiat (74)- 2019
La société de travaux subaquatiques O’CAN a fait appel à plusieurs reprises à Subsea Tech en 2019 pour diverses missions sur le barrage de Génissiat, exploité par la Compagnie Nationale du Rhône (CNR). La première mission consistait à inspecter un bouchon de vanne ainsi qu’une conduite DN500 sur un linéaire d’environ 15m par 45m de fond. La CNR cherchait à confirmer le bon état des éléments suite à des travaux effectués par les plongeurs de la société O’CAN. La compacité et la légerté du mini-ROV Guardian utilisé pour cette mission ont permis un déploiement depuis le couronnement du barrage, surplombant la surface d’environ 12m
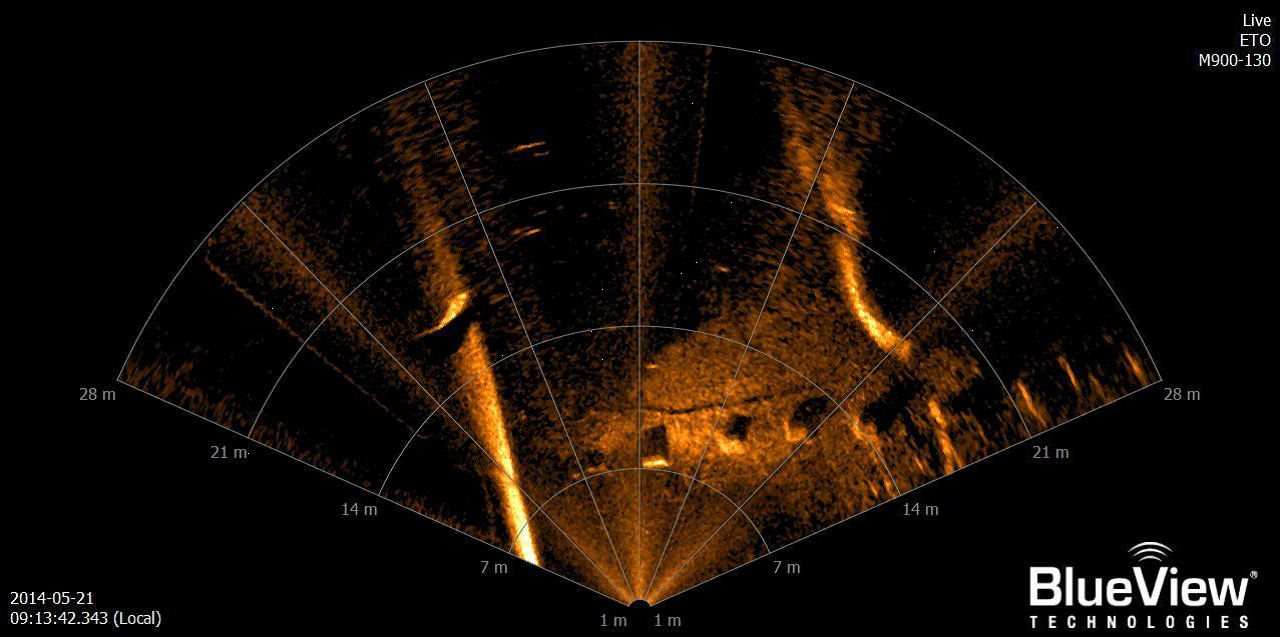
La seconde mission visait à contrôler le pompage de sédiments au pied de la vanne amont du canal de dérivation du barrage. Cette intervention a nécessité l’utilisation d’un mini-ROV Guardian équipé d’une caméra acoustique Oculus M750d, cette dernière étant indispensable en raison de la forte turbidité de l’eau et des larges surfaces à inspecter. L’important angle d’ouverture horizontal du sonar (130°) combiné à sa grand portée (jusqu’à 120m) permettait de visualiser l’intégralité de la zone d’inspection sans déplacer le ROV. L’inspection était réalisée 2 fois par jour, lors des arrêts de la pompe, afin de contrôler l’efficacité du pompage.
Acquisitions laser 3D dans la conduite forcée hors d’eau de Passy
EDF - Passy (74) - 2016
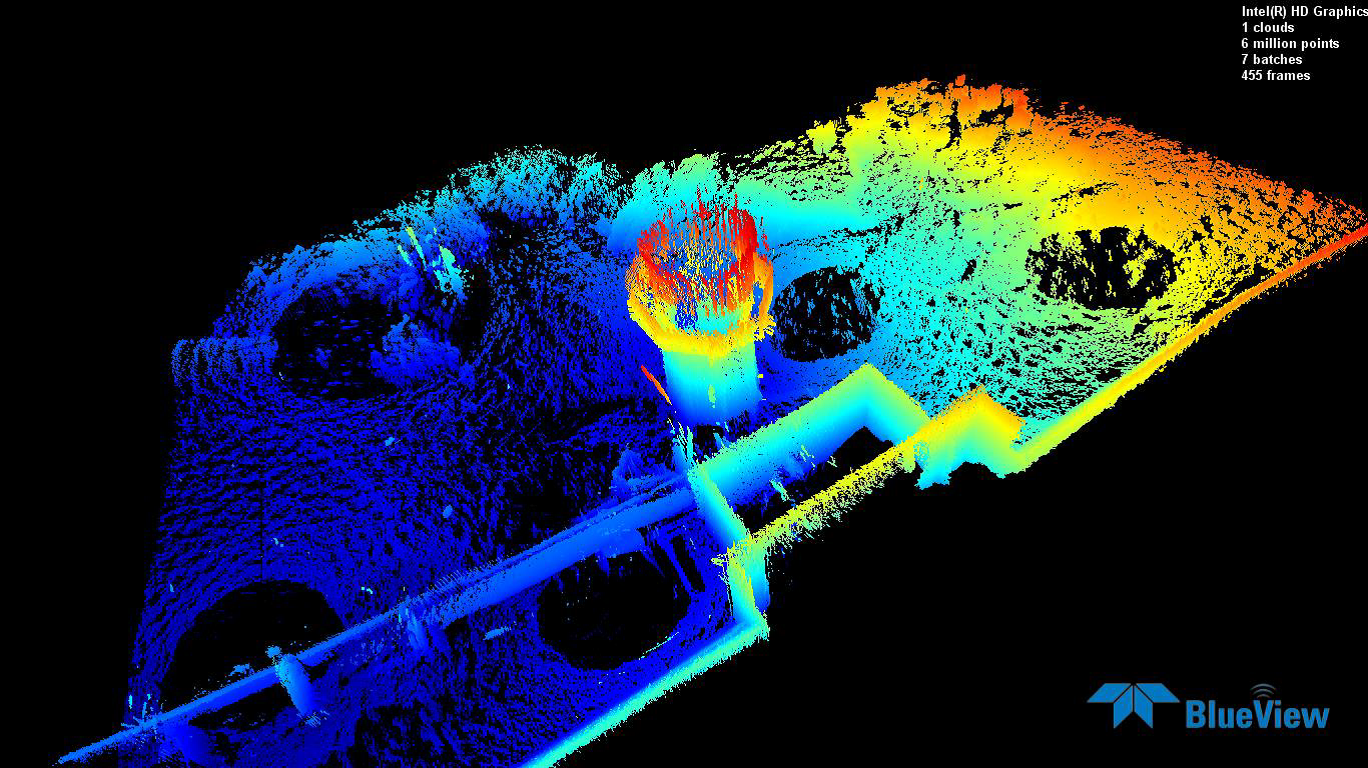
En 2016, Subsea Tech réalise pour le compte de la DTG (Division Technique Générale) d’EDF des essais au niveau de la centrale hydroélectrique de Passy (74) pour modéliser en 3D une partie de la conduite forcée hors d’eau. La modélisation est effectuée à l’aide d’un scanner laser 3D ULS-200 de 2G Robotics monté pour l’occasion sur un chariot motorisé équipé d’un odomètre développé par Subsea Tech et permettant de reconstruire le modèle 3D en temps réel. Le scanner laser permet de reconstruire en 3D des structures en air comme en eau avec une résolution millimétrique, afin notamment de contrôler des distances très précises sur les ouvrages.


Quelques références clients
- TRACTEBEL – Saint-Georges-de-Noisné (79): Inspection par mini-ROV et sonar du barrage de la Touche Poupard
- EDF – Barrage de Serre-Ponçon (05) : Prélèvement de peinture sur une vanne de fond du barrage de Serre-Ponçon
- EDF – Albi (81) : Inspection d’une vanne sur le barrage du Saut du Sabo
- Hubble Aerial Data – Ghisoni (2B) : Bathymétrie et inspection subaquatique sur le barrage de Trévadine
- EDF – Saint-Martin de la Porte (73) : Expertise par ROV des résurgences du barrage de Saint-Martin de la Porte
- QRV Systems – Brno (République Tchèque) : Inspection barrage de Brno
- Hydrokarst – Beaufort-sur-Doron (73) : Inspection de vanne sur le barrage Roselend
- EMCC – Villefort (48) : Inspection barrage de Villefort
Et plus de 40 autres références auprès de donneurs d’ordres publics et privés
Vous avez un barrage à inspecter ? Contactez-nous