Applications
Navires et portuaire
Basée à Marseille, importante ville portuaire, Subsea Tech connaît bien les contraintes opérationnelles des acteurs du secteur maritime en matière d’inspection et de maintenance de leurs navires et infrastructures portuaires.
Qu’ils soient dédiés au transport de passagers ou de marchandises, les navires commerciaux doivent faire l’objet d’inspections régulières de leurs parties immergées, telles que les coques, les propulseurs ou encore les ballasts. Ces inspections sont souvent nécessaires pour préparer les opérations de maintenance ou répondre à des exigences réglementaires.
Traditionnellement, ces opérations nécessitent une mise en cale sèche ou l’intervention d’équipes de plongeurs. Ces méthodes peuvent engendrer des coûts élevés, des immobilisations prolongées des navires et des contraintes opérationnelles importantes.
Les solutions robotisées développées par Subsea Tech permettent de réaliser ces inspections directement en eau grâce à l’utilisation de ROV (robots sous-marins téléopérés) et de drones de surface (USV). Ces systèmes permettent d’optimiser les opérations d’inspection et de maintenance tout en réduisant les coûts, les délais et les risques pour les opérateurs.
Applications typiques
Les solutions Subsea Tech sont utilisées dans le secteur maritime et portuaire pour des missions telles que :
-
inspection de coques de navires (UWILD – Underwater Inspection In Lieu of Dry Dock)
-
inspection de propulseurs et appendices
-
inspection de ballasts et espaces confinés
-
inspection d’infrastructures portuaires
-
supervision d’opérations de renflouement d’embarcations ou d’épaves
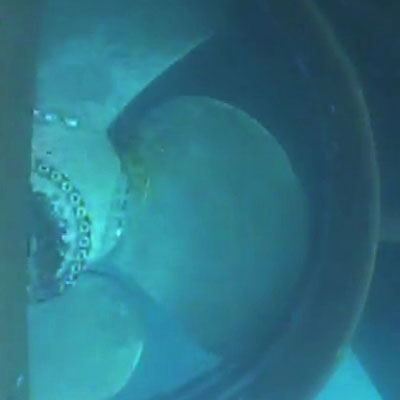
Inspection de coques et propulseurs
Les ROV Subsea Tech permettent de réaliser des inspections visuelles, acoustiques et des mesures directement en eau sur les coques et les systèmes de propulsion des navires.
Ces inspections, connues sous le nom de UWILD (Underwater Inspection In Lieu of Dry Dock), permettent d’évaluer l’état des structures immergées sans immobiliser le navire en cale sèche.
Un opérateur expérimenté peut inspecter un navire complet en quelques heures seulement, ce qui réduit considérablement les coûts d’inspection et facilite la planification des opérations de maintenance.
Exemples de missions
-
inspection visuelle de coques et de propulseurs à l’aide d’un ROV
-
détection de défauts structurels ou de zones de corrosion
-
dimensionnement des défauts à l’aide de pointeurs laser
-
mesure d’épaisseur des structures par sonde ultrason
-
contrôle de la protection cathodique des anodes
Bénéfices
-
réduction du temps et des coûts d’inspection
-
optimisation de la planification des opérations de maintenance
-
réduction du temps d’immobilisation en cale sèche
-
réduction des risques humains liés aux inspections sous-marines
Inspection de ballasts
L’inspection des ballasts représente une opération complexe et potentiellement dangereuse lorsqu’elle est réalisée par des équipes humaines. Elle nécessite souvent la vidange préalable des ballasts et l’intervention d’équipes spécialisées.
Les mini-ROV Subsea Tech permettent d’effectuer ces inspections directement dans les ballasts en eau, sans nécessiter leur vidange complète.
Grâce à leurs dimensions compactes, ces robots peuvent accéder à des espaces confinés via des ouvertures techniques telles que les trous d’homme.
Exemples de missions
-
inspection visuelle des structures internes des ballasts
-
détection de corrosion ou de défauts structurels
-
mesure d’épaisseur des structures
-
contrôle de la protection cathodique
Bénéfices
-
cartographie des zones inspectées et des mesures réalisées
-
réduction des risques humains liés à l’inspection des ballasts
-
réduction des coûts d’inspection et de maintenance
-
réduction des risques environnementaux liés à la vidange des ballasts

Supervision du renflouement d’embarcations
Produits recommandés

Micro-ROV Observer
ROV ultraportable dédié aux inspections visuelles rapides de coques, propulseurs et infrastructures portuaires.

Mini TORTUGA
ROV polyvalent permettant l’intégration de sonars, lasers et capteurs NDT pour les inspections de navires et d’infrastructures maritimes.

Mini TORTUGA XP4
ROV conçu pour les missions d’inspection complexes nécessitant stabilité, puissance et intégration de capteurs avancés.

USV AirCAT
Drone de surface permettant de réaliser des levés sonar, des missions de surveillance portuaire et le déploiement de capteurs.
Technologies embarquées
Les solutions Subsea Tech peuvent intégrer différents capteurs afin d’adapter les systèmes aux missions d’inspection maritime et portuaire.

Sonar d’imagerie
Les caméras acoustiques permettent d’obtenir des images en temps réel des structures même en eau turbide ou en visibilité nulle.

Sonars latéraux et multifaisceaux
Ces capteurs permettent la détection d’objets ou d’épaves ainsi que la cartographie des fonds marins.

Photogrammétrie 3D
Les systèmes de reconstruction 3D permettent de modéliser les structures inspectées afin de suivre leur évolution dans le temps.

Outils de contrôle non destructif
Les ROV peuvent embarquer différents capteurs pour mesurer l’épaisseur des structures, analyser la protection cathodique ou détecter les défauts structurels.
Pour découvrir l’ensemble des capteurs et équipements disponibles, consultez nos pages :